Transformation变换(1)
1.基础变换
引入齐次坐标,对于二维平面:
点 (x, y) ,其齐次坐标为:(x, y ,1)
向量(x, y),其齐次坐标为:(x, y, 0)
可以保证加减性质不变:
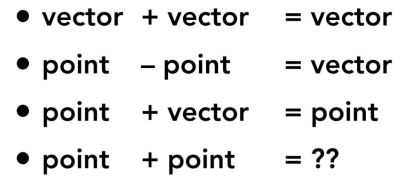
想一想:点 + 点表示的是上面:
表示的是两个点连线的中点、
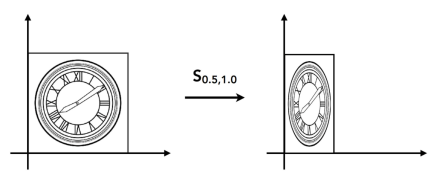
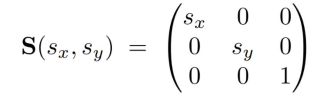
1.1 缩放
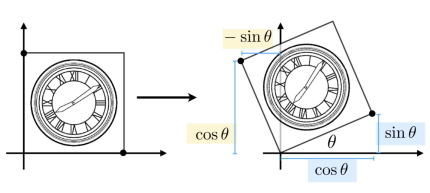
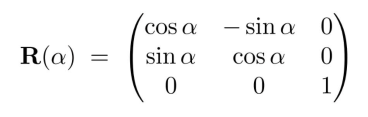
1.2旋转
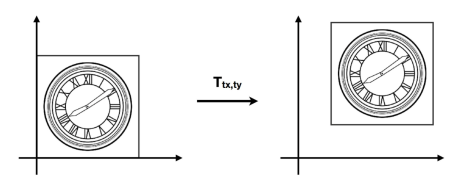
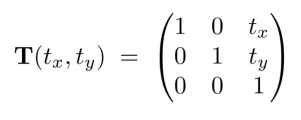
1.3平移
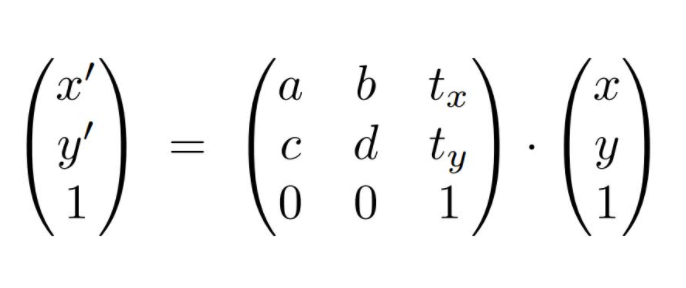
1.4仿射变换
仿射变换 = 线性变换 + 平移变换
1.5复合变换
多个简单的变换矩阵可以组合成一个矩阵(相乘即可,注意顺序)
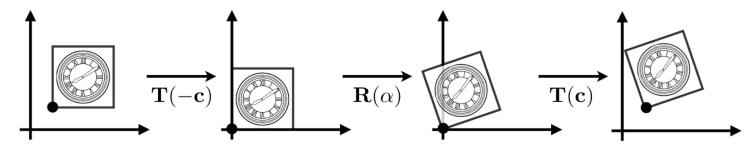
比如要将某个点绕着一个非原点的点(a, b)旋转a度,可以进行如下操作:
思路:
我们先把点(a,b)看成原点,这就需要先做平移变换,将点平移(-a,-b)
然后绕着原点旋转a度
然后把点平移(a,b)
1.6逆变换
观察旋转矩阵,逆时针旋转 a 角度
$$
A =
\begin{bmatrix}
\cos(\alpha) & -\sin(\alpha) \
\sin(\alpha) & \cos(\alpha) \
\end{bmatrix}
$$
若要旋转 -a 角度,则其变换矩阵为:
$$
B =
\begin{bmatrix}
\cos(\alpha) & \sin(\alpha) \
-\sin(\alpha) & \cos(\alpha) \
\end{bmatrix}
$$
显然可以看出:
$$
A * B = E
$$
转置矩阵与逆矩阵相等的矩阵称为正交矩阵。 且所有的旋转矩阵都是正交矩阵
2.3D变换
3维空间同样适用二维的齐次坐标规则
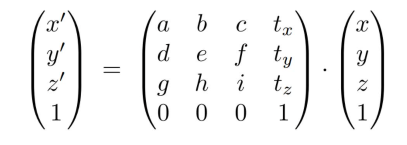
3维的仿射变换:
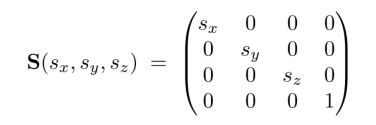
2.1缩放
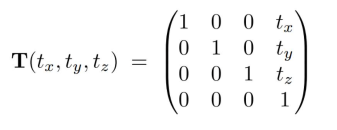
2.2平移
2.3旋转
2.3.1绕某一个轴旋转
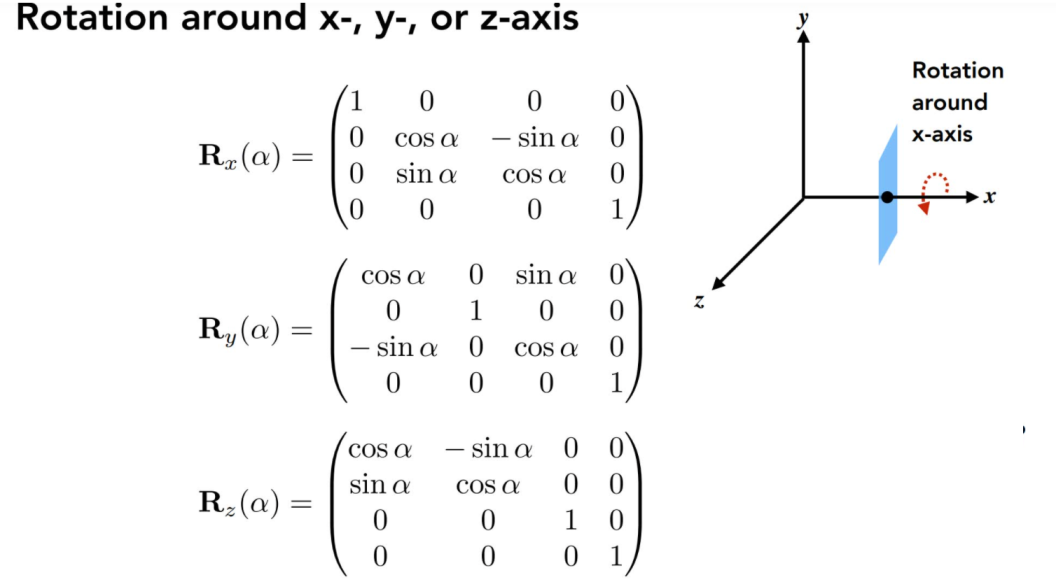
- 注意:这里的绕y轴旋转公式与x和z轴有所不同。
- xyz坐标系, x叉乘y得z, y叉乘z得x,y等于z叉乘x。xyz轴的关系:z-xy, x-yz, y-zx
2.3.2任意旋转
任意角度的旋转都可以转换成绕x、y、z轴的旋转的组合
Rodrigues 旋转公式:

其是3阶单位矩阵,矩阵 其实就是向量的叉积矩阵(被该矩阵作用得到的结果 等同于 与n向量叉积的结果)
http://example.com/2024/01/26/计算机图形学/Transformation(1)/